Engranajes electrónicos, compensación de fase y compensación del juego del engranaje
Ver el BasicMotion_SynchronizedMotion.project ejemplo en el directorio de instalación de CODESYS bajo ..\CODESYS SoftMotion\Examples.
Este ejemplo muestra cómo utilizar una caja de cambios electrónica en combinación con un desplazamiento de fase y una compensación del juego del engranaje.
Estructura de la aplicación
La aplicación consta de una máquina de estados simple en el PLC_PRG programa y un seguimiento que puede utilizar para realizar un seguimiento sencillo de la funcionalidad de los bloques de funciones.
Habilitar los ejes con
MC_Power.(STATE_POWER)Inicie los movimientos sincrónicos y mueva el eje maestro continuamente entre la posición 0 y la posición 100 (
STATE_COMMAND_POS_0ySTATE_COMMAND_POS_1).
Uso
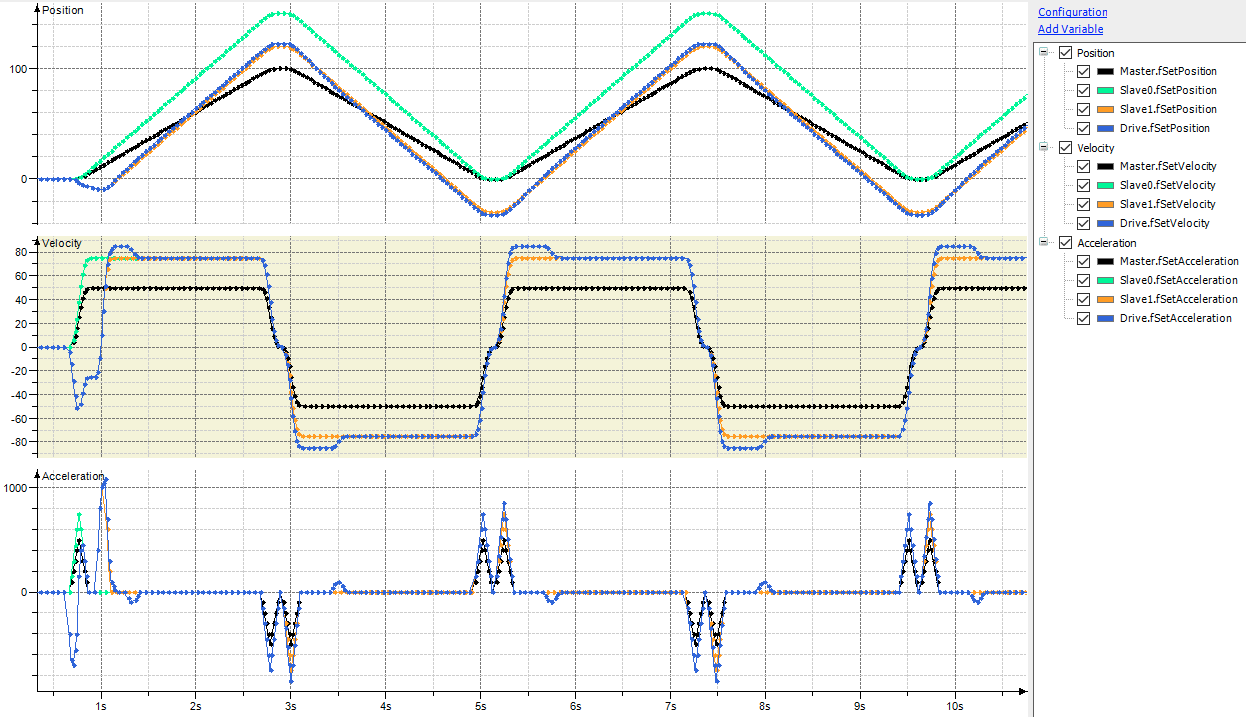
El eje maestro (negro en el diagrama de seguimiento) se mueve continuamente hacia adelante y hacia atrás entre la posición 0 y la posición 100 a una velocidad máxima de 50 unidades por segundo.
Una caja de cambios electrónica (MC_GearIn) con una relación de transmisión de 2:3 convierte el movimiento maestro en el Slave0 eje (verde en el diagrama de seguimiento). La velocidad máxima resultante de los engranajes es de 75 unidades por segundo.
Entonces, un desplazamiento de fase (MC_Phasing) de 30 unidades se aplica a la Slave1 eje (naranja en el diagrama de traza). La velocidad es idéntica a la Slave0 eje, excepto en la fase de rampa de entrada.
Finalmente, la compensación del juego del engranaje se utiliza para llevar el movimiento al Drive eje (azul en el diagrama de seguimiento). Para fines demostrativos se establece un valor irrealmente alto de 5 unidades para el juego del engranaje. El diagrama muestra un movimiento de compensación al inicio del movimiento y en cada inversión de la dirección del movimiento.